Three and a half robots I built for the 2.007 competition “May the Torque be With You.”
2.007 is the rite of passage of (almost) every Sophomore Mechanical Engineering student. If you’ve been an FRC nerd since high school like I have then you’ve also been looking forward to this class since your MIT freshman year. The class is centered around a robotics competition with different game objectives every year, in which students learn, explore, and develop their manufacturing and design skills.
When I took the class, the game was Star Wars themed and the game board was based on a X-wing fighter. It quickly became apparent that the thruster spinning objective would dominate game play this year because of its exponential scoring method. Anyone gunning for the top was making some variant of the thruster spinning robot. Despite holding a strong belief that the autonomous wheel contact spinner, as was the design of the second place robot, Tornado, was the optimal robot design for point scoring, I decided to pursue a different strategy by spreading out top and bottom thruster scoring between two separate robots in order to maximize defense potential. This was possible because the rule book stated that multiple robots are allowed as long as they fit in the starting frame perimeter. It was clear to me then that my goal would be to fit as many robots into the frame perimeter as reasonably possible.
I ended up with three primary robots, a first for the bottom thruster, a second for the top thruster, and a third immobile scissor lift that would lift the second robot onto the top level. I also constructed a few days before the final competition a stationary catapult that would replace the scissor lift robot for a special strategy to take out Tornado, the only robot I was confident I couldn’t outscore. Sadly, in a last minute controversial ruling, it was decided that the catapult did not count as a legal means of crossing the top platform as the wheel it launched was not a “robot.”
The build of the thruster spinning robots was similar; both using double plate rear-wheel drive styles, a tried-and-true design from my FRC days. The bottom robot had a slower speed gearing for its drive train since I wanted the extra torque for defensive pushing.
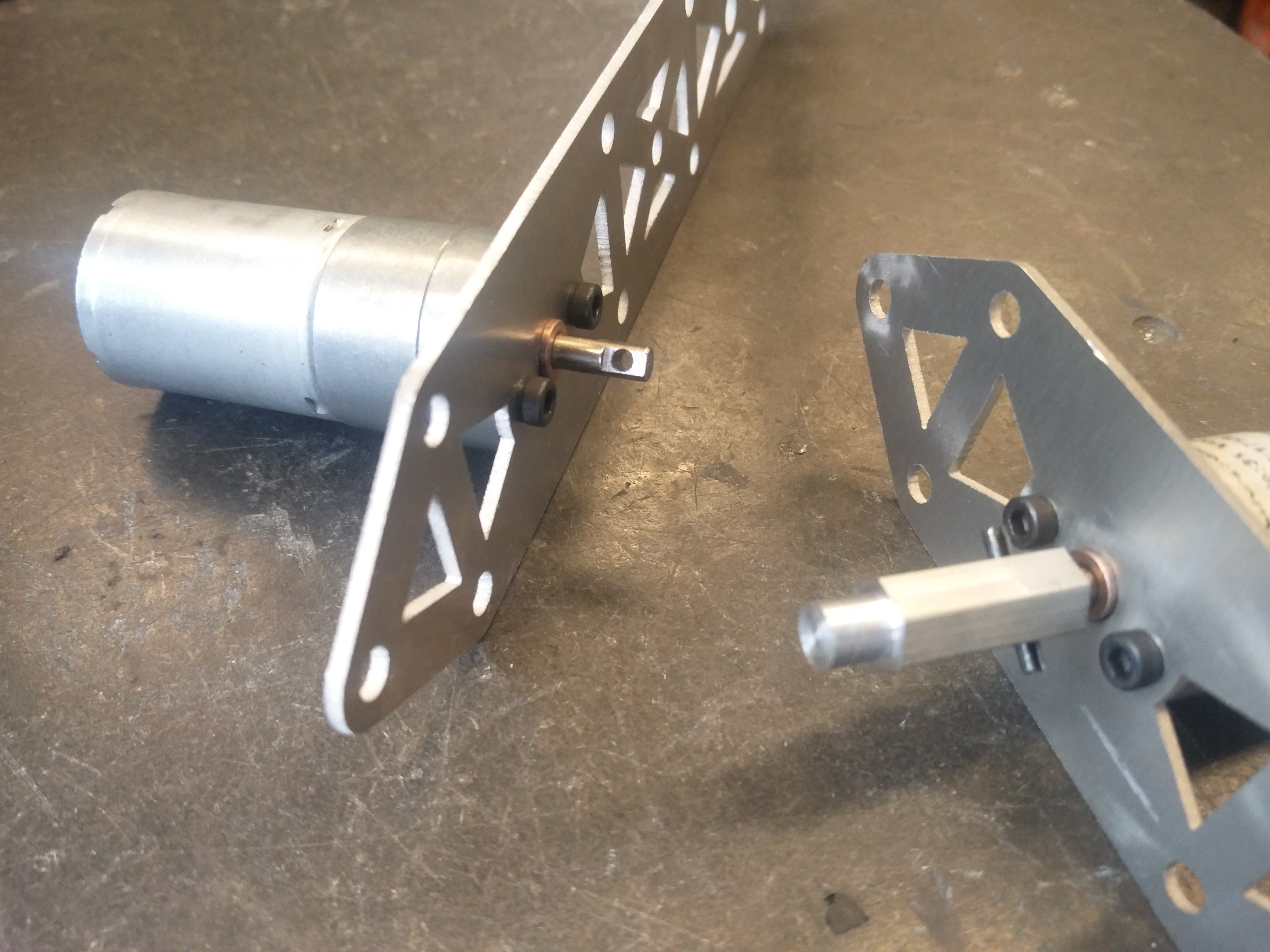
The gearbox motors attached to the plates and the drive axel held in place via roll pin.
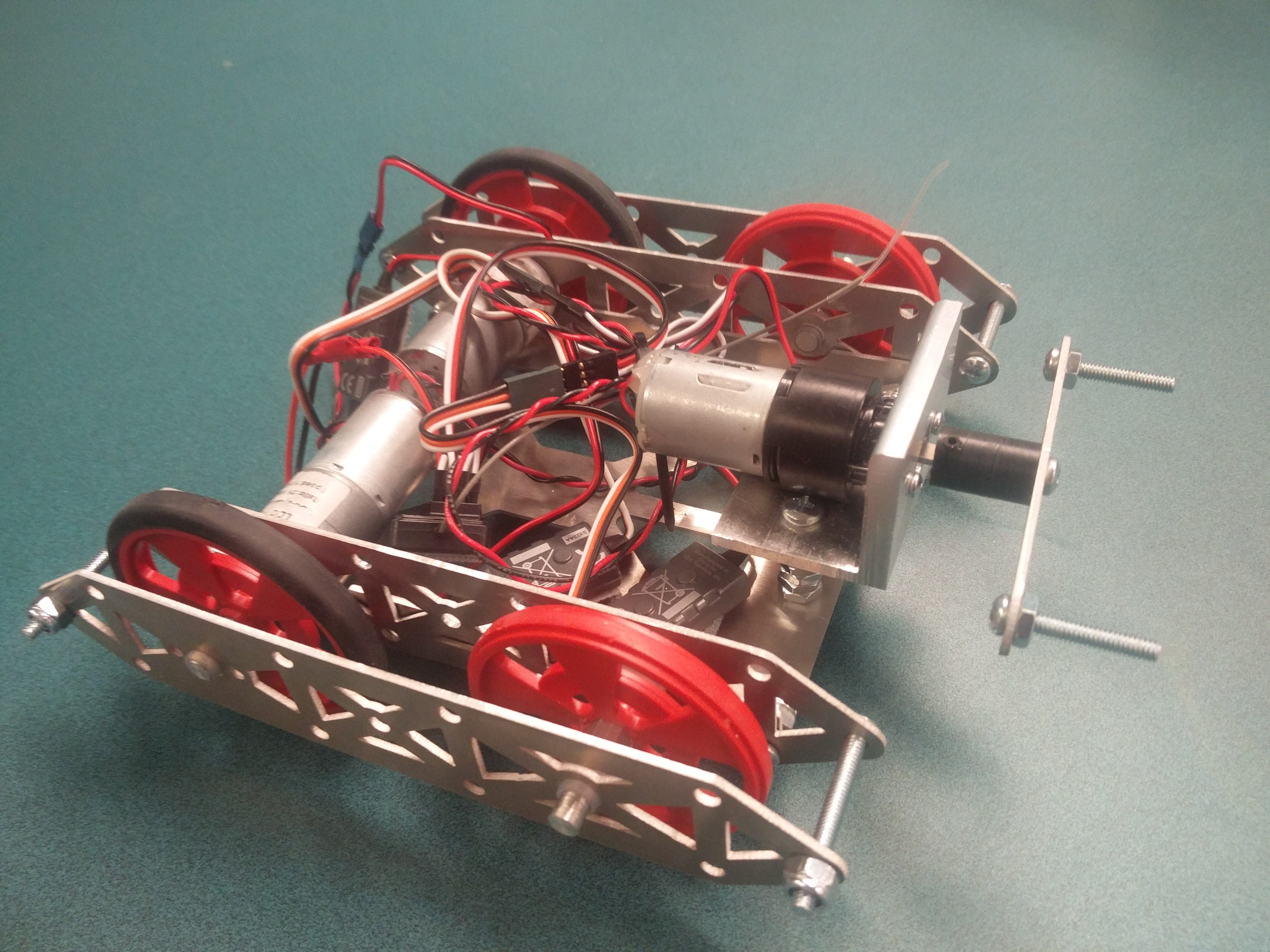
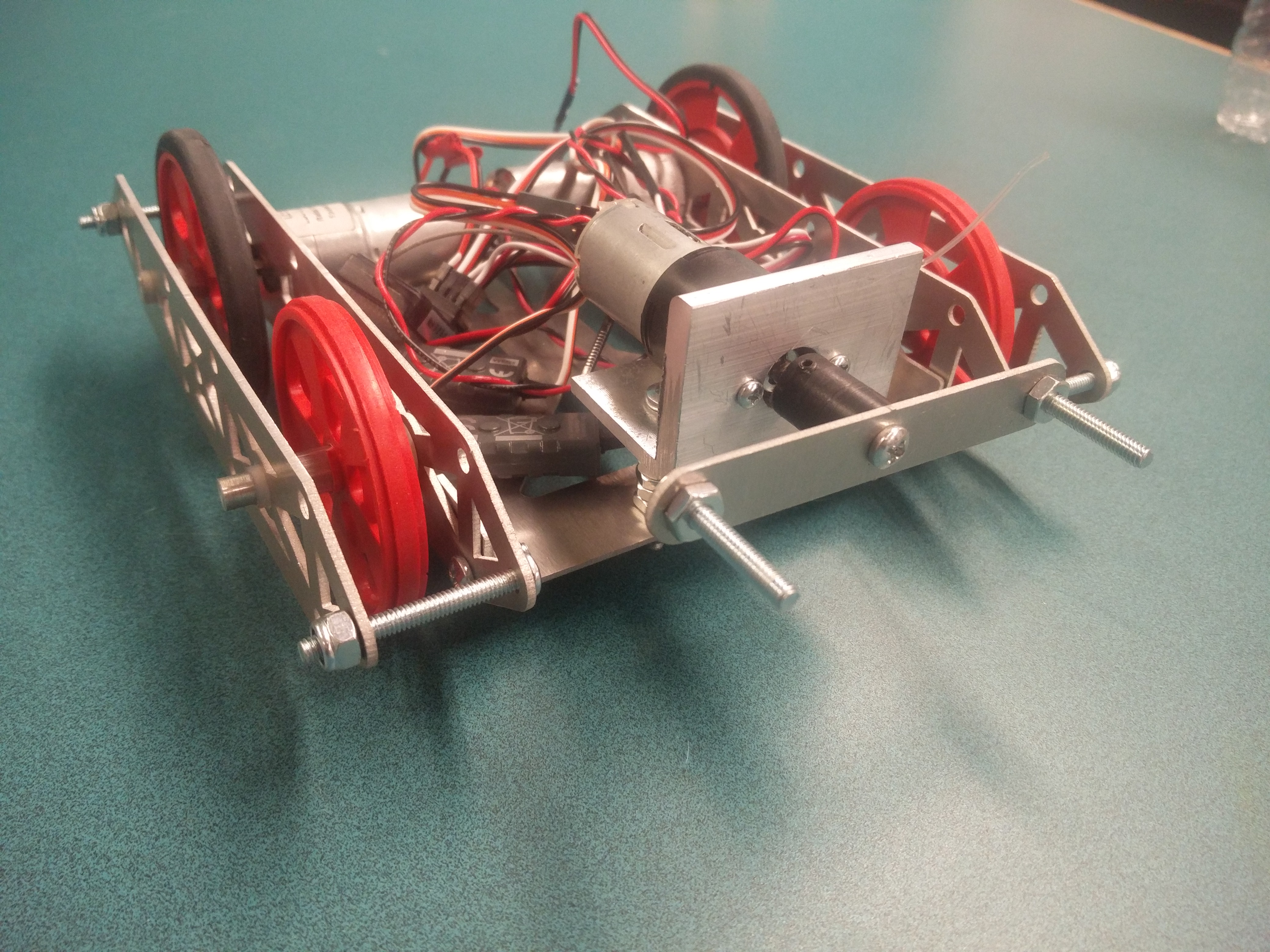
Top thruster robot. The thruster spinning mechanism is simple consisting of a single gearbox motor attached to a two pronged fork that mates with the thruster face.
The bottom thruster robot is near identical with the exception of the aforementioned higher gear-ratio and two threaded rods that elevate the spinner to the right height for the bottom thruster.
The real challenge throughout this whole ordeal was designing and building the scissor lift. The thought behind this was to use the scissor lift as a means to access to the top platform through the nose of the X-Wing during the autonomous period. This way I gain the competitive edge by having stage position before my opponent.

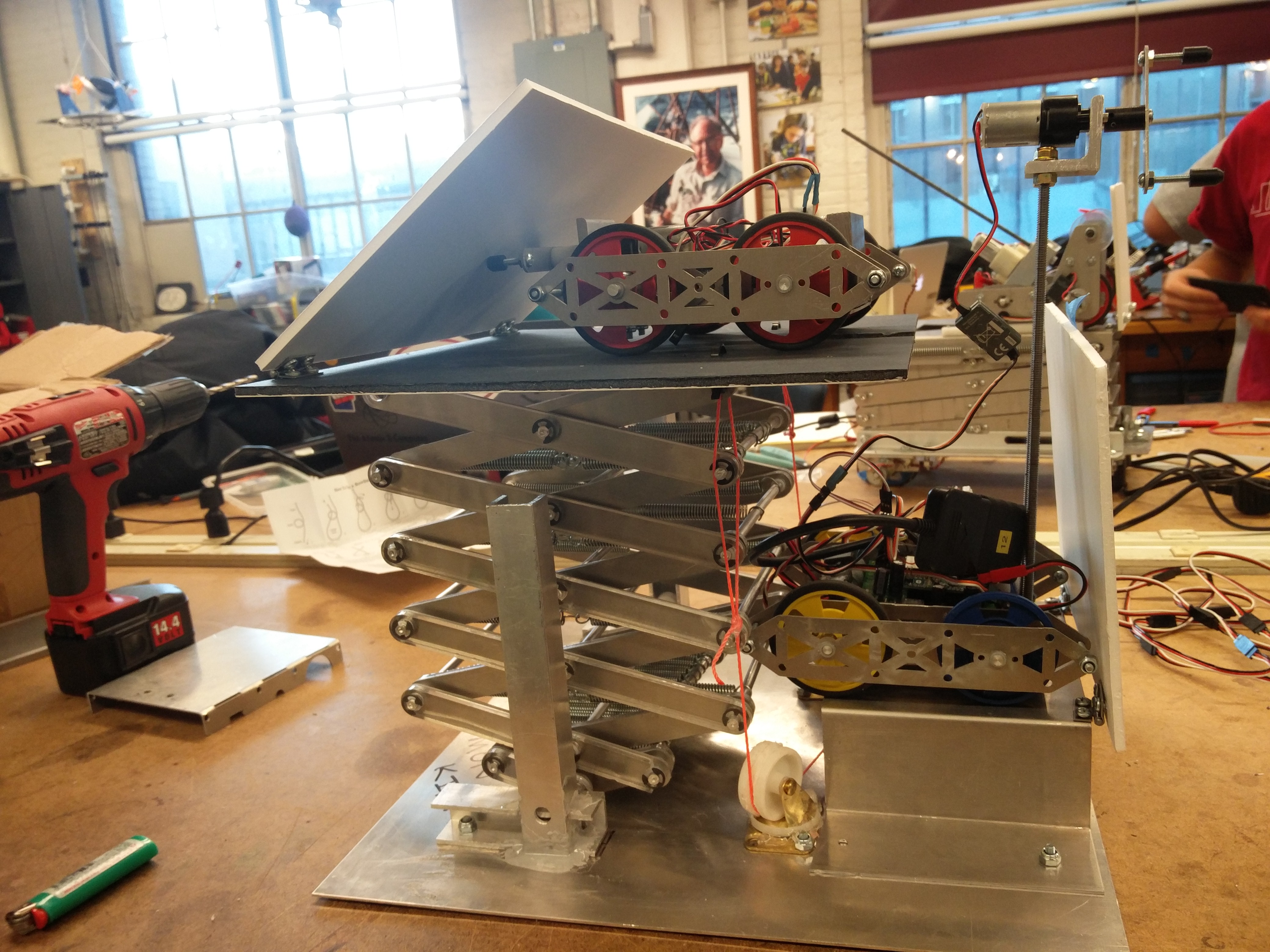
An early prototype of my scissor lift mechanism carrying one of my robots. In order for the scissor lift to fully actuate in the short time alloted for the autonomous period, I used multiple extension springs initially in tension to do the mechanical work necessary to unfold the scissor lift. Without any damping the springs are capable of launching my robot several feet into the air, but with the addition of damping using a servo motor with its leads shorted together I am able to carefully control the speed at which this system extends.
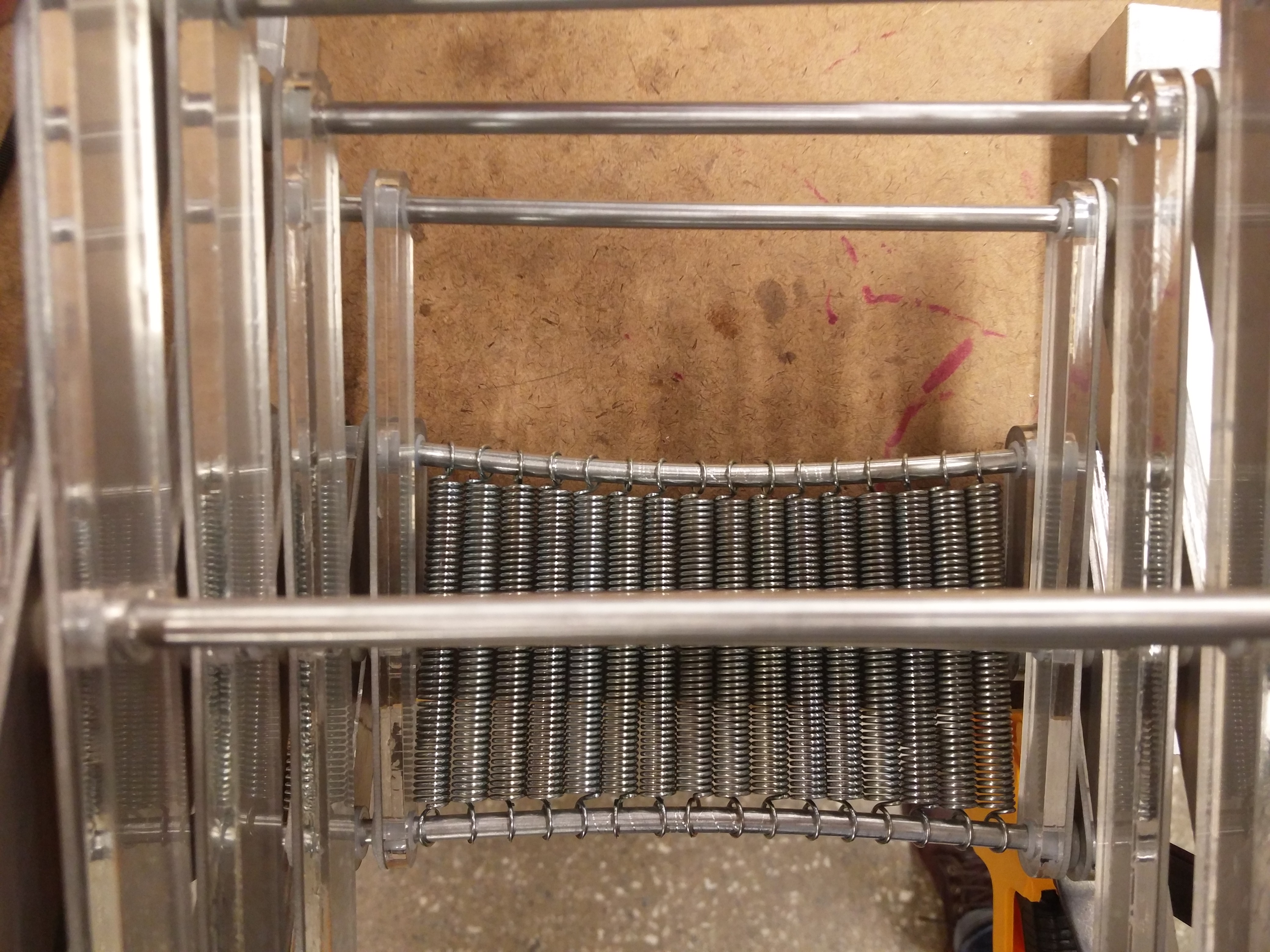
So many springs :O
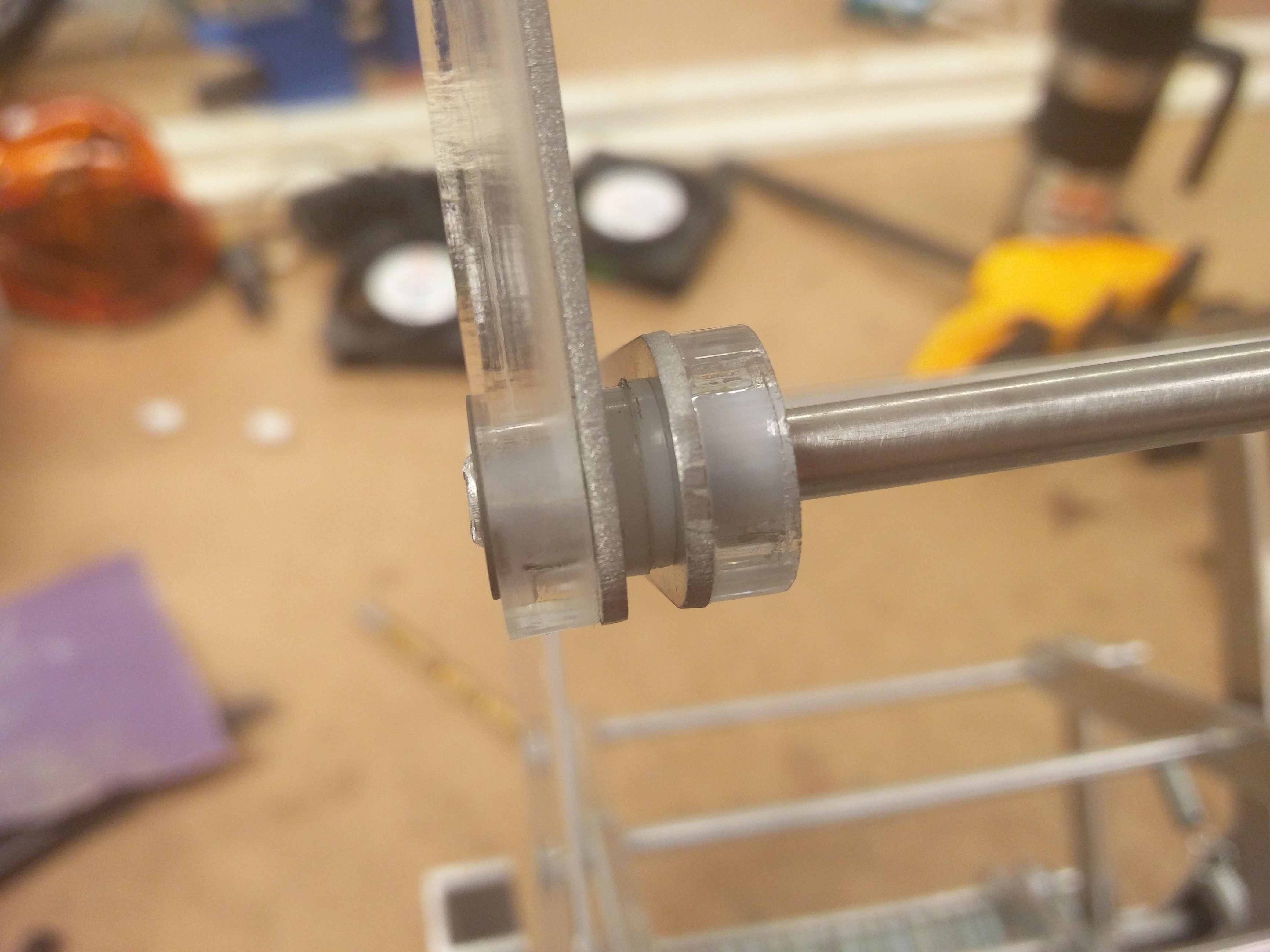
The actual scissor linkages were fabricated using a combination of water jet 6061 aluminum and laser cut acrylic. This composite of two materials takes advantage of the higher fracture strength of the aluminum and the greater stiffness and lighter weight of the acrylic due to its geometry.

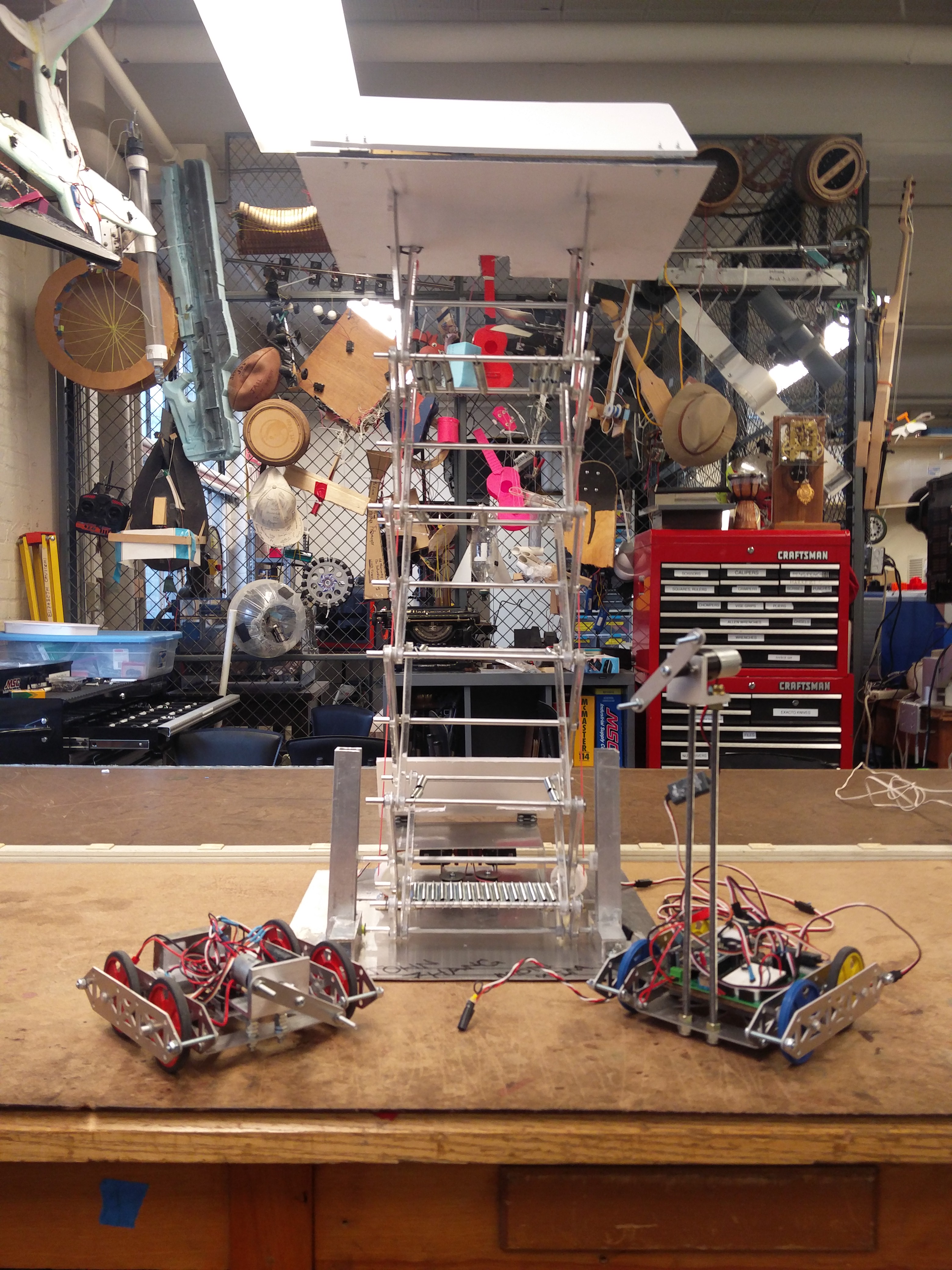
Prototype scissor lift fully built with all the stages.
A compressed scissor lift showing the starting position of my three robots.
Battle of the scissor lifts. My friend Z’s robot and mine fully extended in 4-409.
You can watch a video of my robot in action during the second day of 2.007 finals on the 2.007 stream. My robot ended up making it into the quarter finals. It also won the Whitelaw award for originality in design.